손 동작을 기반으로 로봇을 제어하는 모바일 로봇 제어 시스템
출원번호
1020150127144
등록번호
1018493500000
권리구분
특허권
권리기간
2015-09-08 ~ 2035-09-08
문의처
070-8065-4613
기관의 인기특허












기술 정보
발명명칭
제스처 인식 모바일 로봇 제어 시스템
기술분야
로봇제어
거래방식
#특허판매#노하우#라이선스#연구협력
매도가격
가격 협의
문의처
070-8065-4613
기술 소개
기술 요약
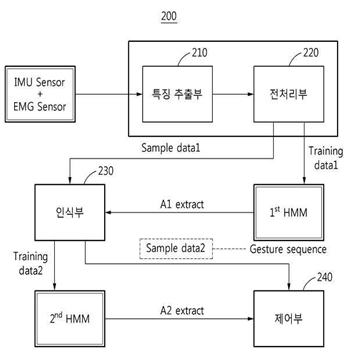
- 본 발명은 관성센서(IMU, Inertia Measurement Unit)와 근전도 센서(EMG, Electromyogram)의 센서퓨전을 사용한 사용자의 제스처 인식에 기반하여 모바일 로봇을 제어하는 기술로서, 일실시예에 따른 로봇 제어 시스템은 근전도 센서(EMG, Electromyogram)로부터 수신되는 제1 센싱값과 관성센서(IMU, Inertia Measurement Unit)로부터 수신되는 제2 센싱값을 수집하는 수집부, 상기 제1 센싱값 및 상기 제2 센싱값에 기초하여 제스처를 인식하는 인식부, 및 상기 인식된 제스처에 상응하는 로봇 제어 신호를 생성하는 제어부를 포함한다.
기술의 특징
- 본 발명은 보다 자연스럽고 지능적인 제스처 기반의 로봇 컨트롤 시스템을 제공하는 것으로, 관성센서와 근전도 센서의 센서퓨전을 사용한 사용자의 제스처 인식에 기반하여 로봇을 제어할 수 있는 기술을 제공하는 것이다.또한 직관적인 제스처를 통한 사람과 로봇간의 커뮤니케이션이 가능하며, 카메라를 통하지 않아 장소에 구애받지 않으므로 다양한 방면으로 응용할 수 있는 로봇 제어 기술을 제공하는 것이다.
기술의 효과
- 관성센서와 근전도 센서의 센서퓨전을 사용한 사용자의 제스처 인식에 기반하여 로봇을 제어할 수 있는 기술을 제공할 수 있다.
- 직관적인 제스처를 통한 사람과 로봇간의 커뮤니케이션이 가능하며, 카메라를 통하지 않아 장소에 구애받지 않으므로 다양한 방면으로 응용할 수 있는 로봇 제어 기술을 제공할 수 있다.
대표도면
- 로봇 제어 시스템 구성도
기술의 완성도(TRL)

매도/수 절차
절차과정
연구자의 보유기술
등록된 콘텐츠가 없습니다. |